

Our vision modules are designed for medical and industrial applications, accelerating development with high-performance, product-grade features and intuitive visual prototyping tools—enabling seamless integration into your workflow.
Transform endoscopic video into 3D reconstructions for measurement, pre-op segmentation registration, and local mapping. Convert monocular video to 3D.
Register surfaces and volumes, determine the pose of objects from images for endoscopic or industrial applications.
Process and optimize meshes and point clouds with advanced filtering and transformation tools.
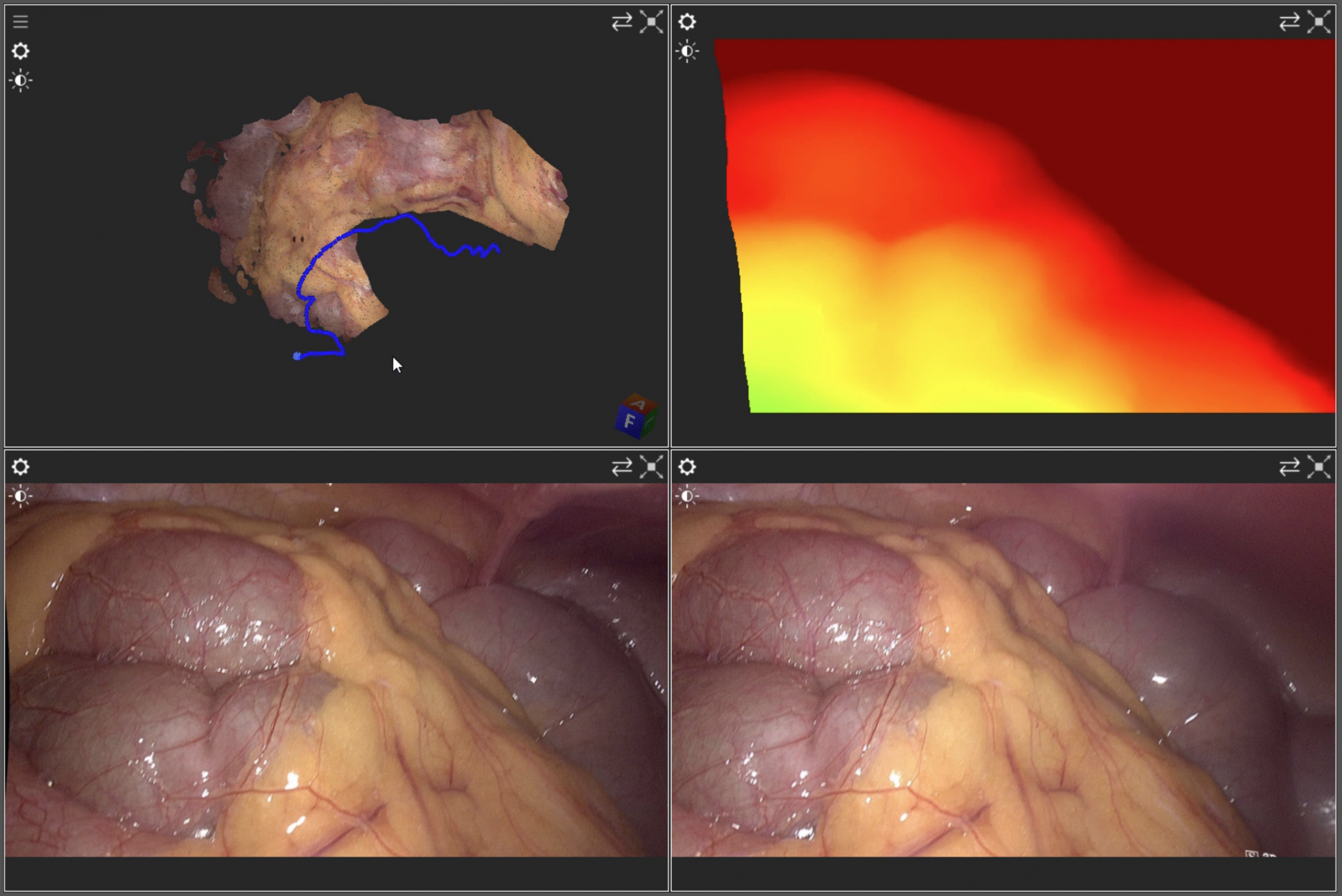
This video shows our endoscopic SLAM pipeline on stereoscopic video of a laparoscopic screening procedure.
The stereo input is converted to a depth map using a state-of-the art learning based stereo depth estimation network. The resulting color + depth stream is then fed into our surfel-based SLAM pipeline.
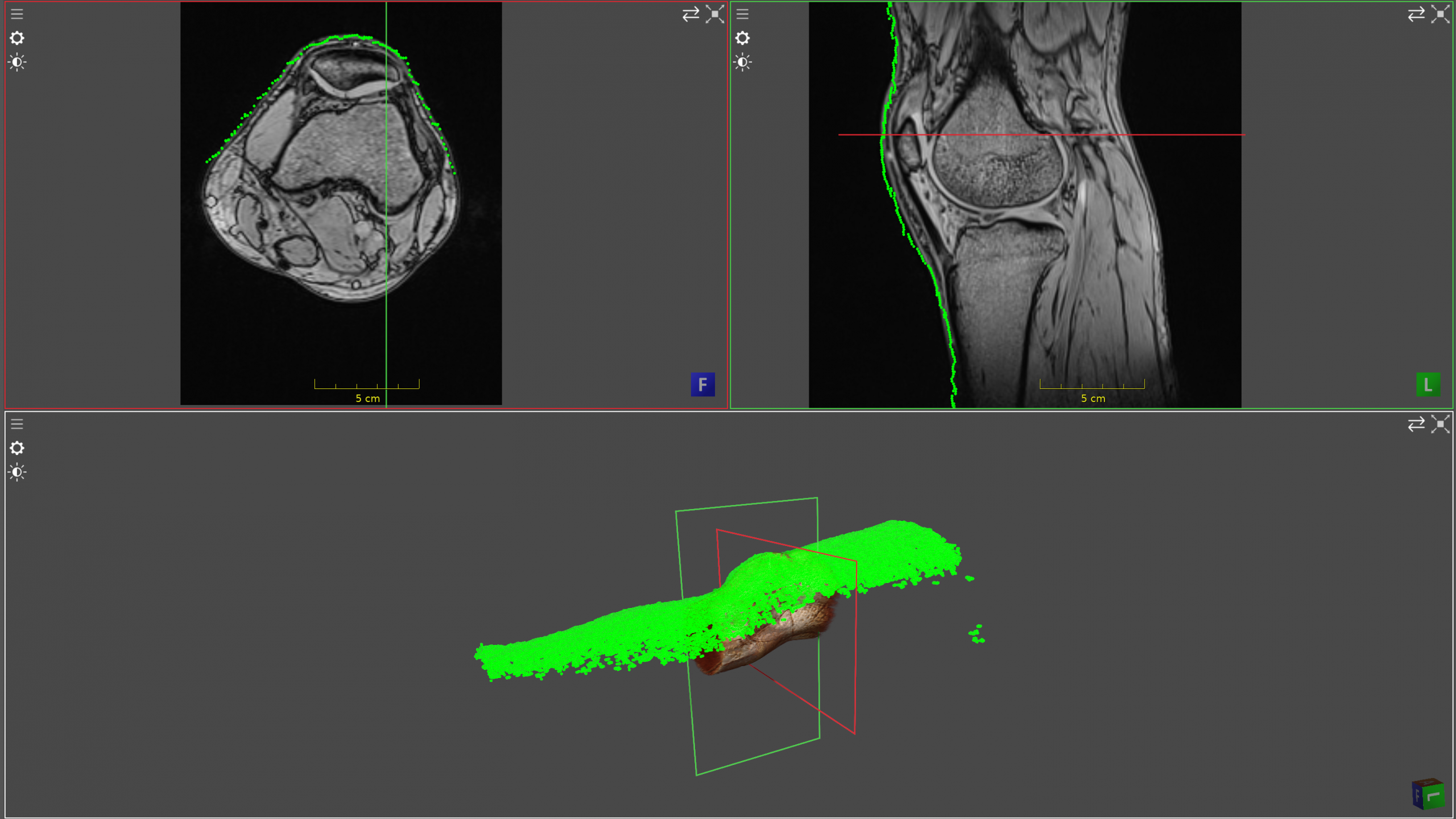
This video shows how to register a 3D surface scan to a CT or MR scan for interventional navigation using ImFusion Computer Vision Suite.
This video shows how different features, including stereo depth reconstruction, optical flow computation, feature tracking and Holoscan integration come together to enable innovative medical applications. For this video we specifically worked with our clinical partners from Orsi to track a pre-op kidney organ segmentation in the endoscopic video as the camera is moved and the tissue interacted with.
Vision
Endoscopy
RGB-D/SLAM
Computational Geometry
VR
Our forum is already packed with some common answers, tips and tricks and support information from our own product experts. Have a look or submit a request to our team.